


発売開始直後からすでに
全国20を超える医療施設に導入済み!
これまでに50以上の医療施設で試験導入を実施いただいております。
Feature
製品の特徴
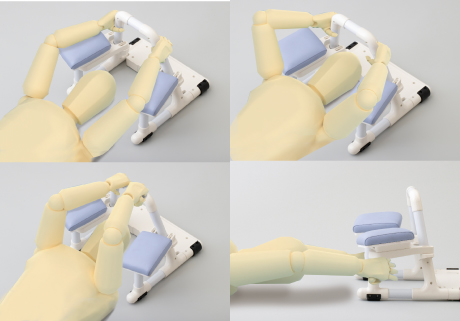
様々な上腕挙上姿勢に対応
関節可動域の狭い方や体格に応じて持ち方を変えることができるため、ユニバーサルな使用に対応できます。パーツの角度調整などの手間もかかりません。
人間工学に基づいた設計
北海道立総合研究機構の協力を受け、人間工学に基づき握りやすく肘が開きにくいデザインを開発しました。腕の自由度を自然に制約し、拘束感なく姿勢が保持できます。
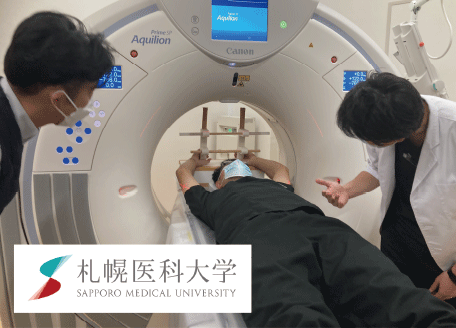
札幌医科大学と共同開発
本製品は札幌医科大学の現場ニーズから発案されました。4年の月日を費やし実際の現場で試作テストを繰り返し、検査技師様・患者様双方から高い評価をいただいております。
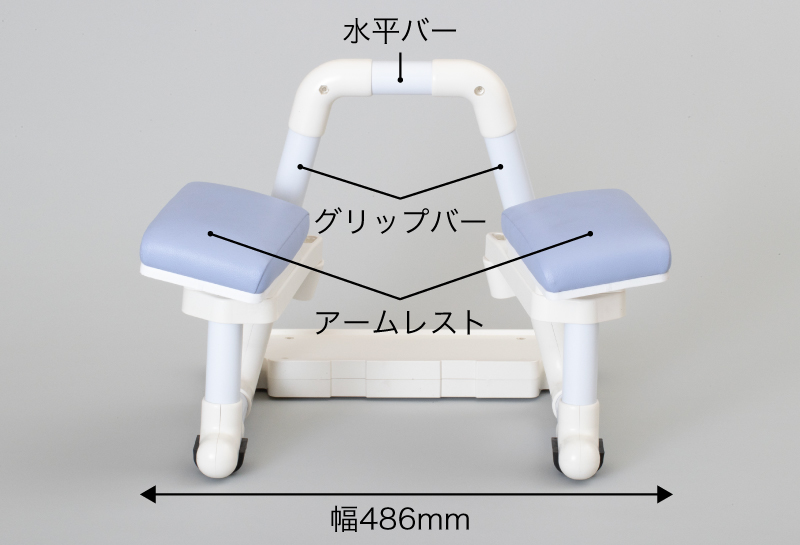
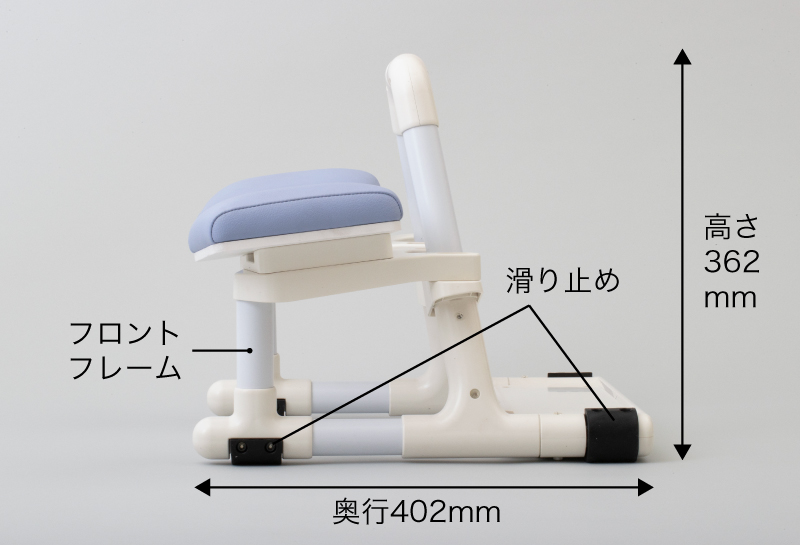
製品の仕様
製品寸法と各部名称
付属品

使用方法
検査対象者の体格や関節可動域の大きさに応じて、さまざまな腕挙上姿勢をとることができます。
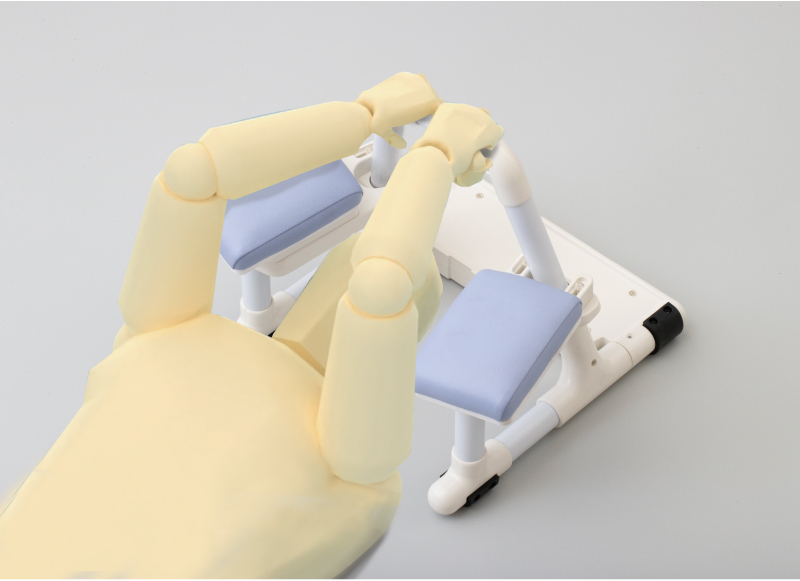
1 − 基本姿勢(グリップバーをつかむ)
前腕をアームレストに置き、奥のグリップバー、または水平バーをつかみます。前腕の曲げ具合で頭の位置を腕置台から少し離れたフロントフレームの内側付近で微調整します。バーに指を引っかけるなど、しっかりつかまなくても、姿勢が楽に保持できれば問題ありません。
※CT検査装置のガントリーに肘が当たる場合は、頭の位置が腕置台に近づきすぎている可能性がありますので、頭の位置を腕置台から少し離すなど調整してください。
2 − 水平バーをつかむ姿勢
グリップバーをつかむことが困難な場合は、アームレストは使用せず、水平バーをつかみます。甲や手首を水平バーに乗せるなど、しっかりつかまなくても、姿勢が保持できていれば問題ありません。
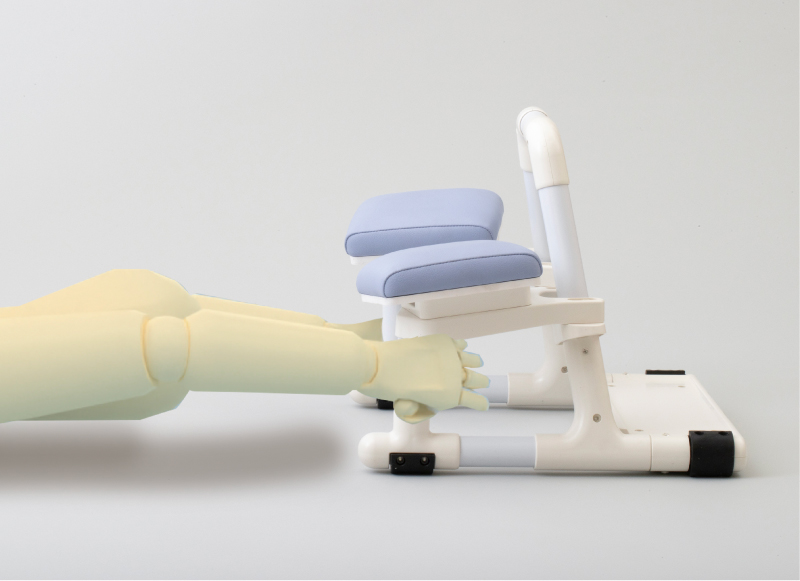
3 − フロントフレームをつかむ姿勢
腕置台を頭から離して、肘を伸ばした状態で、フロントフレームをつかみます。手首をフレームに引っかけるなど、しっかりつかまなくても、姿勢が保持できていれば問題ありません。

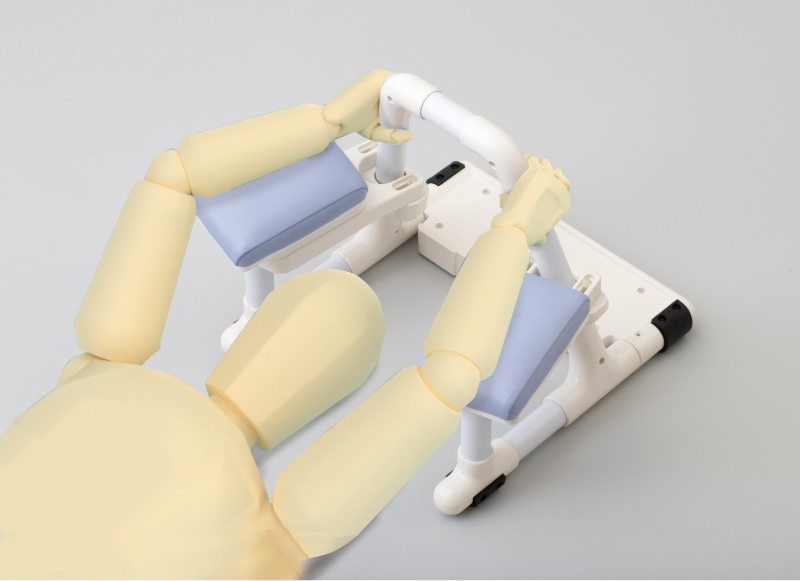
4 − その他の姿勢
前腕をアームレストに乗せるだけで、バーやフレームをつかまない姿勢をとることもできます。また、両腕をクロスした状態で、バーをつかまずに手の甲や手首などをひっかけて姿勢を保持することもできます。
設置方法
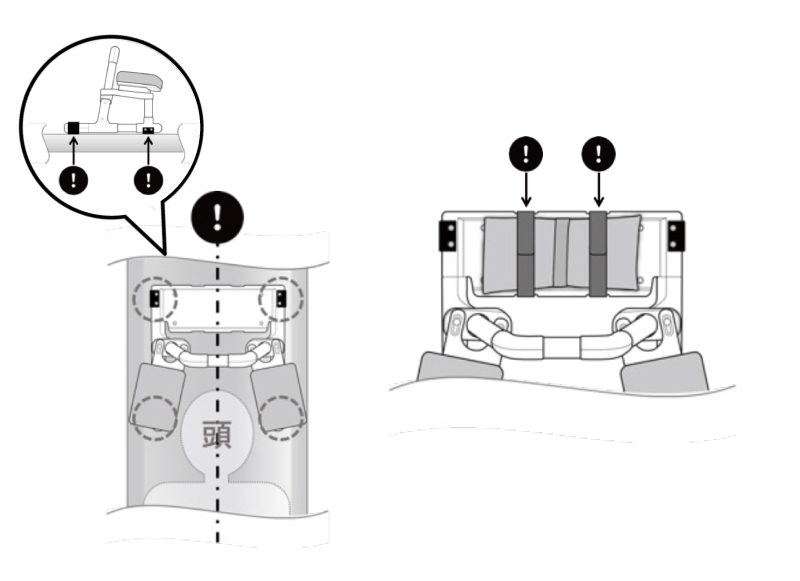
- 検査対象者が寝台に仰向けになった際、頭の上側に、寝台の幅方向に対して中心になるよう設置します。前後方向の微調整は、使用時に検査対象者が行います。
- 設置後、4箇所の滑り止めが寝台にきちんと接しているかを確認してください。4点すべてが接していないと使用時にぐらつくおそれがあります。
- 使用時に腕置台がひっくり返る、またはぐらつく場合には、後方の平らなスペースに砂のうを置いて重心を調整します。砂のうを乗せる場合は付属のバンドで固定してください。
※本製品を寝台から別の場所に移動する際、必ず「砂のう」をはずしてください。怪我や破損するおそれがあります。
こんなときには
CT検査装置のガントリーに肘が当たる場合
基本姿勢をとったときに頭の位置が腕置台に近づきすぎていれば、頭の位置を腕置台から離してください。そのうえで、アームレストの外側端よりも内側になるように肘の位置を調整してください。
造影剤を使用してCT検査を行う場合は
まずは使用方法の【1 – 基本姿勢】を試していただき、それで針が入らないようであれば、【3 – フロントフレームをつかむ姿勢】や【4 – その他の姿勢】の両腕をクロスさせてバーをつかむ姿勢をお試しください。
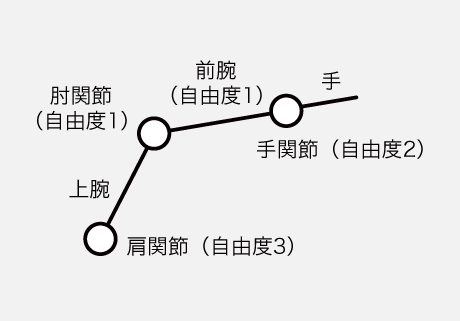
人間工学に基づいた設計
腕の模試図
人間の腕の運動関節軸には、左図のように片腕合計 7つの自由度があります。そのうち、「腕の位置と姿勢を決めるためには6つの自由度が決まればよい」という人間工学に基づいた考え方により、本製品の設計を行っています。 本製品では、仰向けになってバーをつかむだけで腕の自由度が決まるため、拘束感なく安定して腕挙上姿勢を保持することができます。